回転チャックの可動域をを360度以上にするため、以前に作ったものです。たとえばCW方向に回転中、先にCCWのリミットスイッチがONするとエラーになったり停止したりします。CPU位置決め用エラー33 「リミットエラー」 | 制御機器FAQ(よくあるご質問) | キーエンス (keyence.co.jp)
設定でそういう使い方ができるものもあるかと思いますが、これを実装したドライバではエラーとなりました。
今回紹介するものは参考記事のため、これを利用したことによる不都合、損失が発生しましても、当サイト及び管理人は一切責任を負いません。
(2024-08-03 初版投稿)
目次
- 注意点
- 回路図
- PLCでやってみた
注意点
リミットスイッチは3か所使いますが、初期状態でドッグがどのスイッチにもかからない状態からスタートしてください。ドッグは同時に2か所のリミットスイッチにかかる幅にしてください。
回路図
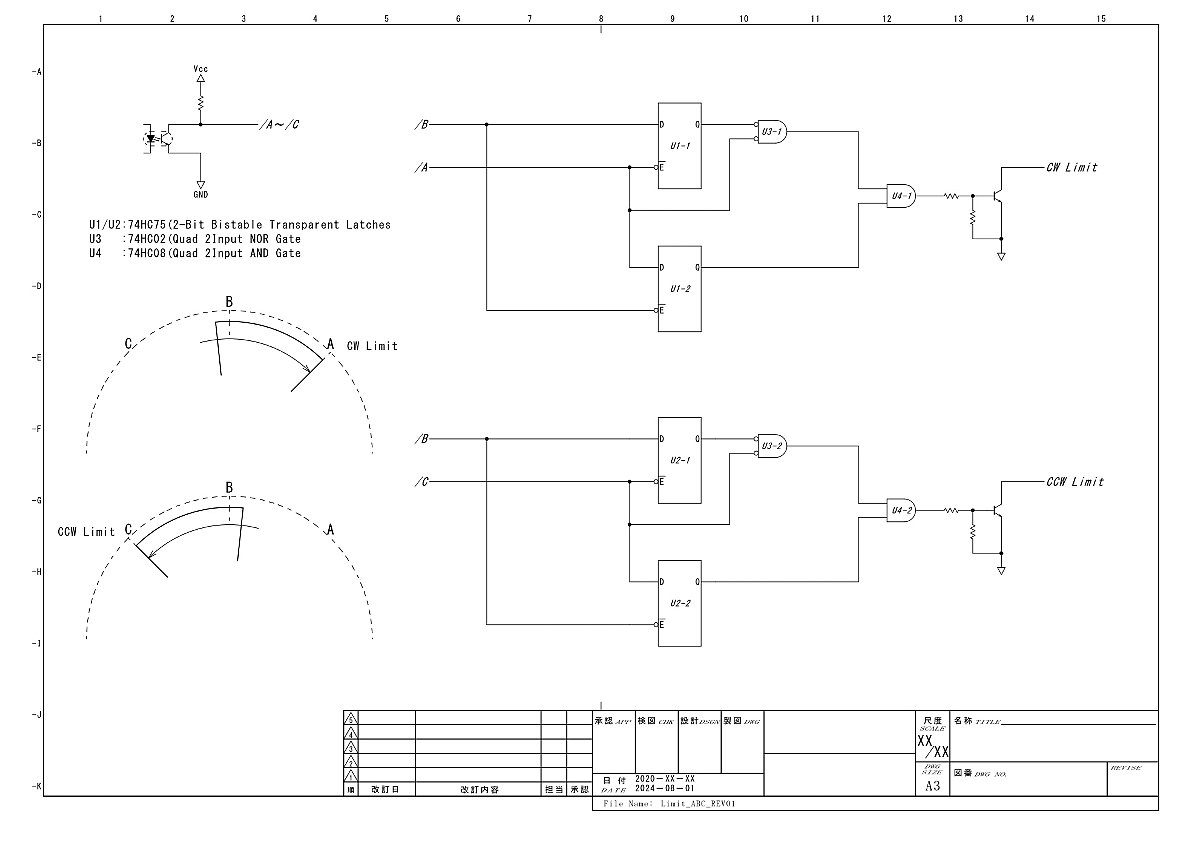
CW用とCCW用に同じものを2回路作ります。スイッチAがCWリミットスイッチ、スイッチCがCCWリミットスイッチ。入力はフォトカプラで受けていますが、必要ならば付けてください。ロジックへの入力はオープンコレクタなのでロジックはローアクティブです。
U1/U2は2回路入り筒抜けラッチ (D Latch) ICです。これを使って方向を検知しています。詳しくは
https://yenqoo.com/spices/basic/phase/phase.html を参照してください。
1つ目のラッチはリミット検出用で、2つ目のラッチは逆方向でのリミットが検知するのを防ぐマスクの役割をしています。
動作シーケンスをアニメション化しました。赤:H / 青:L
CWリミット検出後⇒反転時のシーケンスです。CW時はLatch2がHをラッチするのでスイッチAのONでCWリミットを出力します。
CCWリミット検出後⇒反転時のシーケンスです。CCW時は先にLatch2がLをラッチし出力をマスクします。
PLCでやってみた
PLCでも同じシーケンスを書いてみました。ハードで作るまでもない場合 、スキャン速度的に間に合う場合は参考にしてください。(ラダーをPDFで見る)
参考コードをダウンロード (ラダーと確認用のVTデータ) 参考コードではドッグをエミュレーションしています。KV STUDIO でシミュレーションして動作を確認できます。下の説明動画を参考にしてください。
■下のニーモニックリストをコピーしてKV STUDIOのリスト編集でペーストして実行することもできます。 (「編集(E)」タブ>リスト編集(L)…)
| CWリミット | CCWリミット |
|---|---|
| LDB R000 OR @MR000 LD R000 OR R001 ANL OUT @MR000 CON AND R000 OUT R500 LDB R001 OR @MR001 LD R001 OR R000 ANL OUT @MR001 CON INV AND R500 OUT R500 | LDB R002 OR @MR002 LD R002 OR R001 ANL OUT @MR002 CON AND R002 OUT R501 LDB R001 OR @MR003 LD R001 OR R002 ANL OUT @MR003 CON INV AND R501 OUT R501 |
| R000:センサA / R001:センサB R500:CWリミット | R001:センサB / R002:センサC R501:CCWリミット |
コメント