(2026-04-12 初版投稿)
目次
- P&P 学習用シミュレーションとは
- 最小モデル
- ステージ遷移の全体像
- 5行で書くステージロジック(サンプル)
- 動作デモ
- まとめ
P&P 学習用シミュレーションとは
P&P(Pick & Place)とは、ワークを所定位置から取り上げ(Pick)、別の位置へ移動し(Move)、そこに配置する(Place)一連の動作を指す。FA やロボット制御では最も基本的な動きであり、実機では安全処理や例外分岐が多層に積み重なるが、本質は「状態が順番に進むだけの動作」です。
ここでは、学習目的で P&P(Pick & Place)の動きを理解するための最小モデルを扱います。実機で必要になる安全処理や例外分岐、タイミング調整といった複雑さはいったん取り払い、アームが“どの状態からどの状態へ進むのか”という本質だけに集中できる環境を用意しました。
サンプルはキーエンスのKV-8000で書いています。
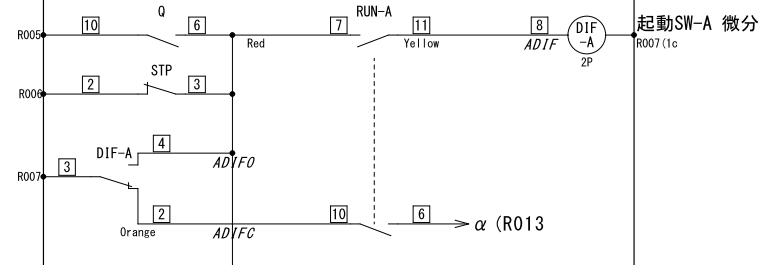
最小モデル
起動スイッチ 他
起動:R2000
選択:MODE1~MODE4
命令ビット
右行:R1201
下行:R1203
把持:R1205
センサービット
左端:R1000
右端:R1001
上端:R1002
下端:R1003
開端:R1004
閉端:R1005
👉本記事で使用する画面データと学習用コードはこちらからダウンロードできます。
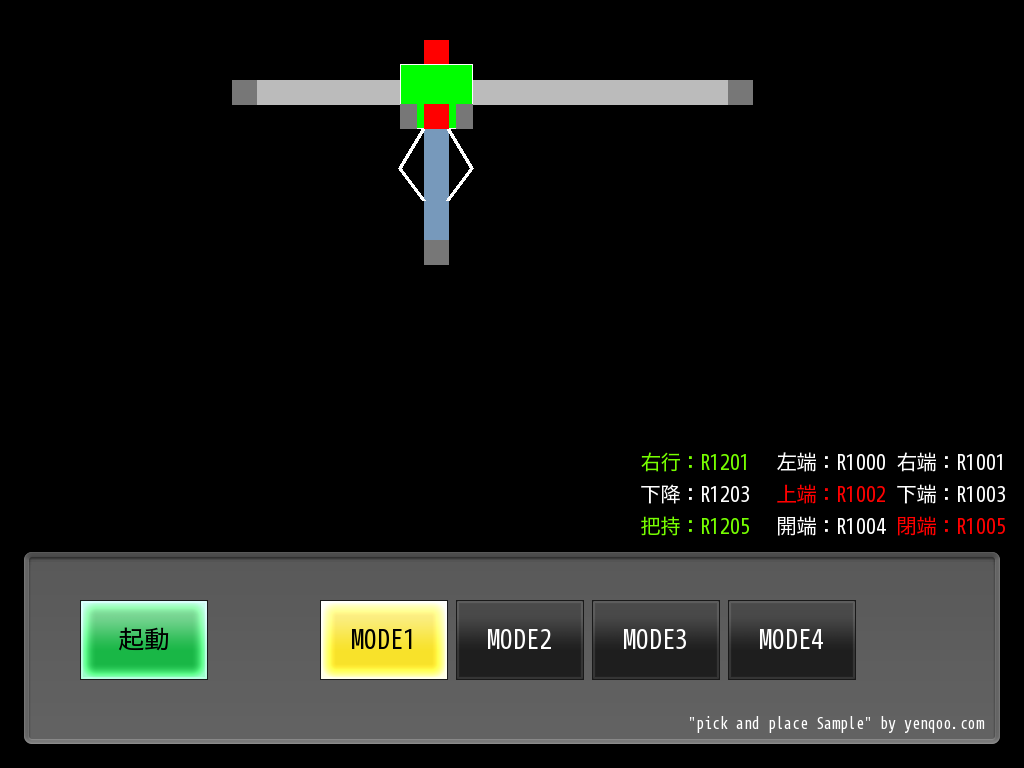
5行で書くステージロジック(サンプル)
サンプル3と4
プロジェクト中 [待機モジュール] の 【Sample3】と【Sample4】は自由に書ける領域にしています。思いつくままコーディングしてください。
■ 参考に、簡単ですが「Sample1」の内容だけを示します。
STG@R000
起動スイッチの確認と、各軸の原点移動命令。原点の確認で次のSTGへ移行します。
STG@R002
下限に達するまで下降命令を、下限到達でチャック閉命令をセットしチャック閉確認後、次のステージへ移行します。
STG@R004
下降命令がOFFしているので上昇します。上限に達したら右行命令をセットし、右限まで移動したら次のステージへ移行します。
STG@R006
下限に達するまで下降命令を、下降後チャックを開きます。チャック開確認で次のステージへ移行します。
STG@R008
下降命令がOFFしているので上昇します。上限に達したら右行命令をリセットし、左限まで行ったら起動スイッチをOFFしてトップに戻ります。
動作デモ
この章では、5 行ステージロジックが実際にどのように動作するかを動画で確認します。
ボタン入力、センサ条件、ステージ遷移、アームの動きがどのタイミングで発生するのかを視覚的に理解することで、前章で説明した「5 行で 1 ステージが閉じる」構造がより明確になります。
下の動画では、R000 → R002 → R004 → R006 → R008 の順にステージが進み、Pick → Move → Place → Return の一連の動作が確認できます。
👉本記事で使用する画面データと学習用コードはこちらからダウンロードできます。
まとめ
学習用 P&P は、Pick → Move → Place → Return の流れを ステージで順番に進めるだけの最小モデルとして作っています。実機の安全処理や例外は入れず、状態遷移の仕組みだけをつかむのが目的。余計な保持や特別な命令を使わない構造にしているので、読者は「こう書けば動く」という感覚をそのまま持ち帰れます。動作デモでステージが切り替わる様子を見れば、記事全体の流れが自然につながると思います。